Research Themes
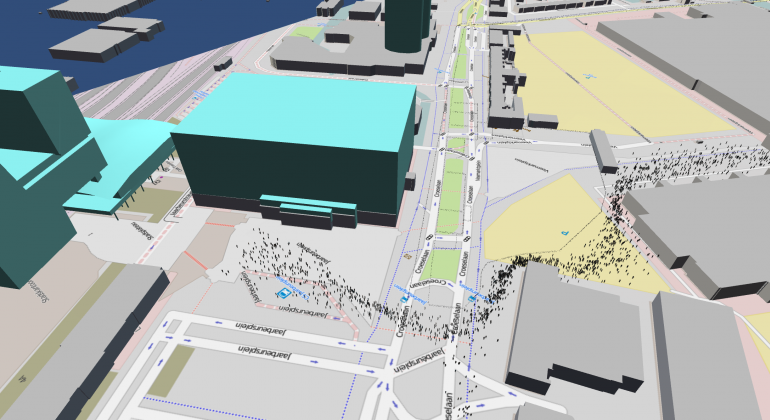
Crowd Simulation
The increasing urbanisation of the world population presents new challenges for decision makers. Real-time crowd simulation is crucial in addressing these challenges, including determining evacuation times in complex buildings, avoiding overcrowded areas during mass events, and improving the crowd flow in cities. We are developing a simulation framework with unique features that aim at realism, speed and accuracy. Our software is available for research and commercial use.
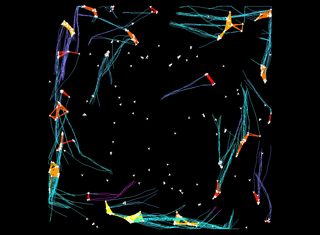
Trajectory Data Analysis
Tracking moving entities has become increasingly relevant due to an ever-growing collection of trajectory data originating from GPS, RFID, video, etc. We develop and improve efficient geometric algorithms, formalise generic patterns, and segment complex trajectory information to analyse movement at the level of individuals, groups, and crowds.
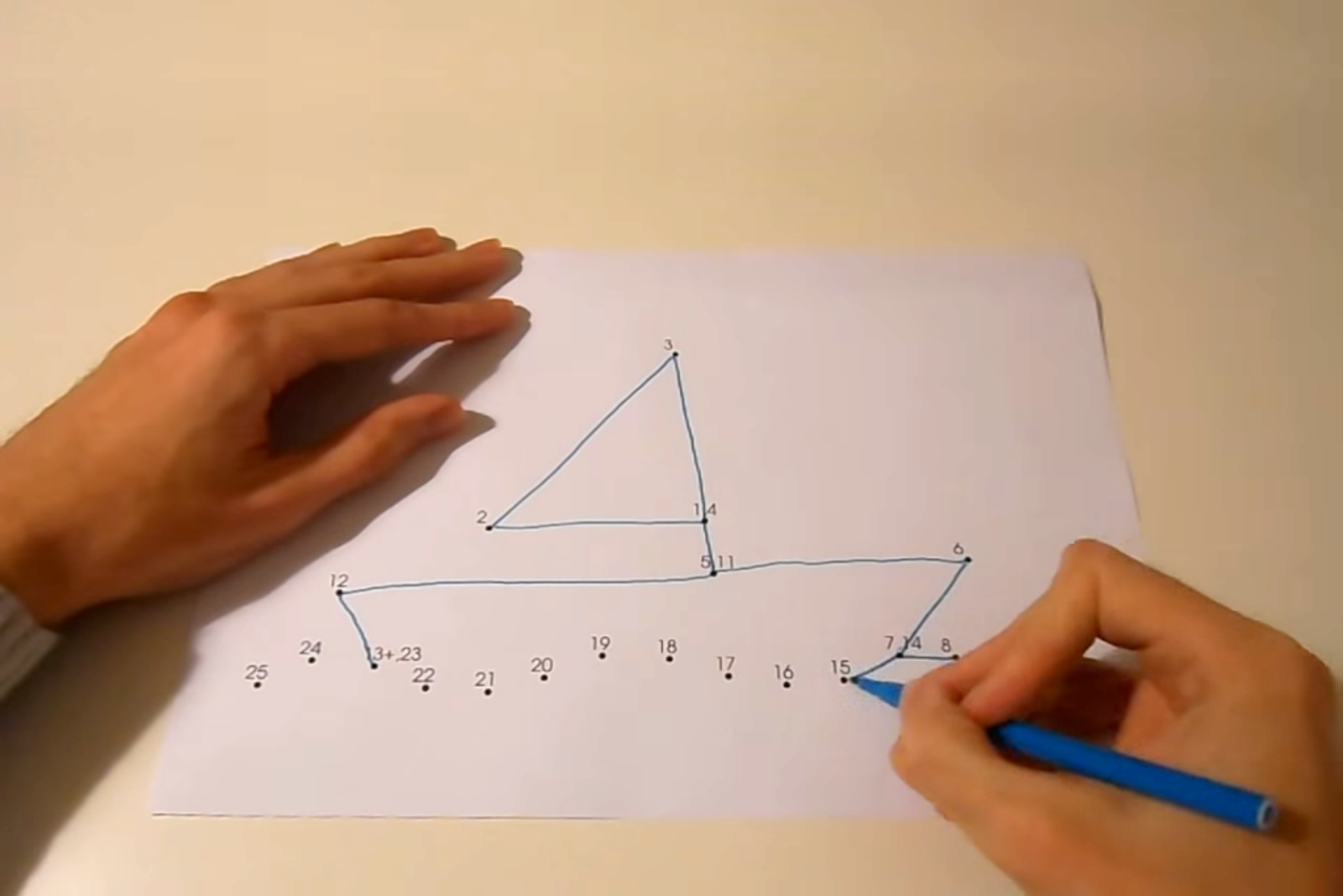
Analysis of Games and Puzzles
Puzzles and puzzle games have been popular since the dawn of mankind, and are known for stimulating brain activity and mental welfare as well as simply being fun. With the spectacular rise of powerful handheld devices over the past years, the market for apps is growing rapidly, and puzzle games make up a large part of this market. This development calls for the automated generation of interesting and fun puzzle instances of just the right difficulty to keep players engaged.
Graph Drawing and Visualisation
Information visualisation is a classic topic that has become crucial in our information-heavy digital age. From slick infographics to detailed interactive cartographic maps, they help us visually understand and interpret the world. The subarea of network visualisation focusses on applications in which the underlying data set is a graph. Graph drawing has a rich history in computer science, but new challenges are posed by the unprecedented size, dynamic nature, and interactive aspects of present-day graphs.
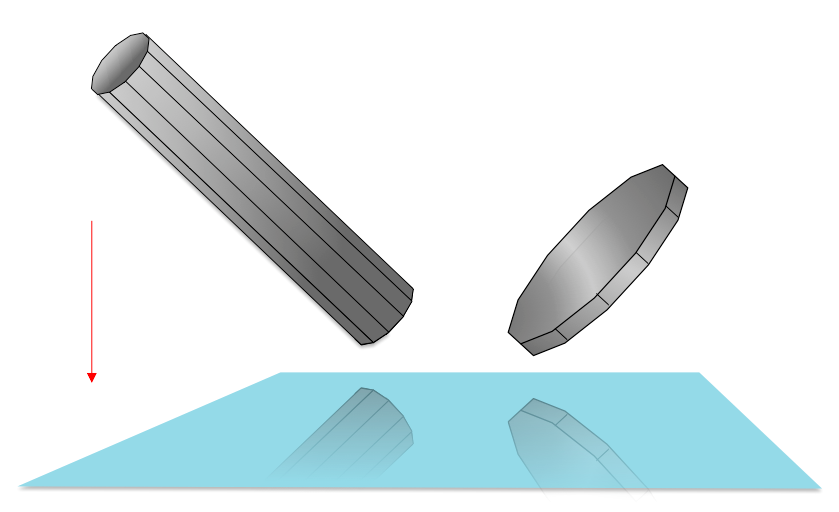
Robot Manipulation and Motion Planning
Humans and robots can manipulate objects using many different approaches. In general, the goal is either to constrain or to force motion, and we consider both types of manipulation on various kinds of objects while taking into account possible shape variations of these manipulated objects. In addition, we study motion planning problems and apply it both to (virtual) object manipulation as well as other fields.